How do you figure out the physical constants of a system when all you have are noisy measurements? This post walks through using JAX to solve an inverse problem: learning the damping and gravitational constants of a pendulum from observed angle data.
The Problem
The second-order ODE for a damped pendulum is:
$$\frac{d^2\theta(t)}{dt^2} + b \frac{d\theta(t)}{dt} + c \sin{\theta(t)} = 0$$where $b$ is the damping coefficient and $c$ is related to gravity and pendulum length. We want to learn $b$ and $c$ from measurements of $\theta(t)$.
To use JAX’s ODE solver, we convert this to a first-order system by defining angular velocity $\omega(t) = \theta'(t)$:
$$\frac{d\theta}{dt} = \omega$$$$\frac{d\omega}{dt} = -b\omega - c\sin\theta$$Setting Up the Model
First, the imports and the ODE system:
import jax.numpy as np
from jax import jit, random, value_and_grad
from jax.experimental.ode import odeint
def pend(y, t, b, c):
theta, omega = y
return np.hstack([omega, -b * omega - c * np.sin(theta)])
def model(y0, t, params):
return odeint(pend, y0, t, *params)
Generating Synthetic Data
In practice you’d have experimental measurements. Here we simulate them with added noise:
# True parameters
b = 0.25
c = 5.0
true_params = np.asarray([b, c])
# Initial conditions: nearly vertical, at rest
y0 = [np.pi - 0.1, 0.0]
# Time points
t = np.linspace(0, 10, 101)
# Simulate and add noise
data = model(y0, t, (b, c))
theta, omega = data.T
key = random.PRNGKey(0)
noisy_theta = theta + 0.3 * theta * random.normal(key, shape=theta.shape)
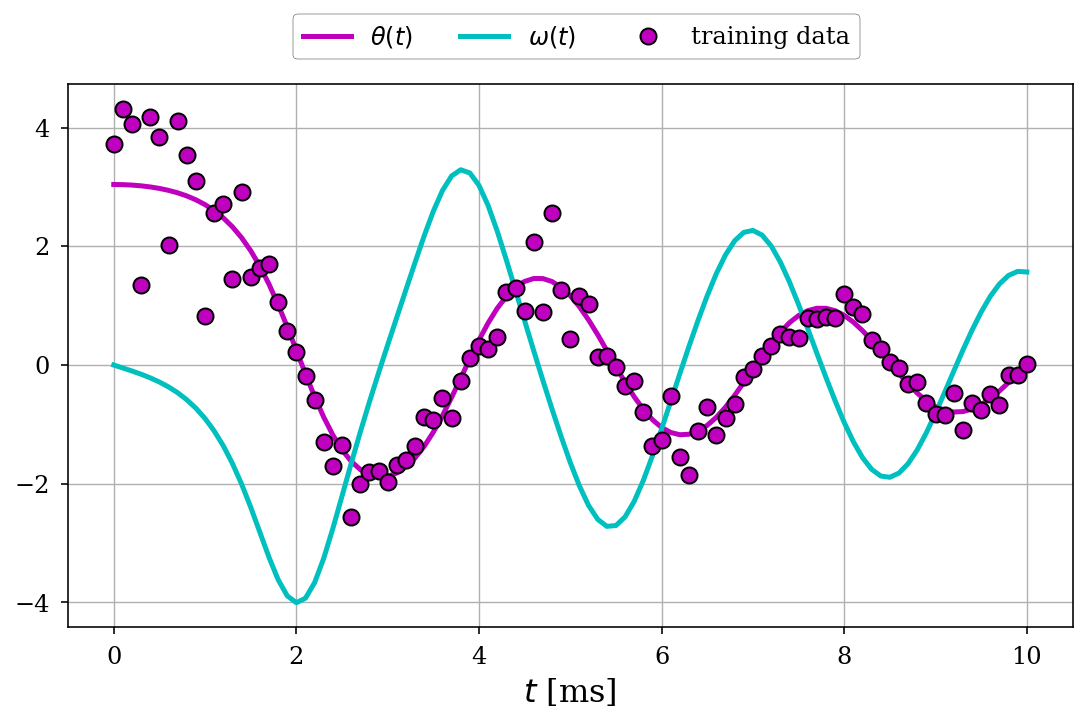
The plot below shows the true dynamics (angle $\theta(t)$ in magenta and angular velocity $\omega(t)$ in cyan) along with the noisy training data (magenta dots):
Learning Parameters with Gradient Descent
The key insight: JAX can differentiate through the ODE solver. We define a loss function and use value_and_grad to get both the loss and its gradient with respect to parameters:
def mse(y_true, y_pred):
return np.mean((y_true - y_pred) ** 2)
@jit
def loss_fn(params, y0, t, y_true):
y_pred = model(y0, t, params)
return mse(y_true, y_pred[:, 0])
@jit
def step(params, y0, t, y_true, lr):
loss, grads = value_and_grad(loss_fn)(params, y0, t, y_true)
return params - lr * grads, loss
Then we run gradient descent:
# Random initial guess
key, subkey = random.split(key)
params = random.uniform(subkey, shape=(2,), minval=0, maxval=10)
# Training loop
lr = 0.01
for epoch in range(1000):
params, loss = step(params, y0, t, noisy_theta, lr)
if epoch % 100 == 0:
print(f"Epoch {epoch}, Loss: {loss:.6f}")
opt_params = params
Results
After training, the fitted parameters closely match the true values:
Actual | Initial | Fitted
b (damping): 0.25 | 3.42 | 0.26
c (gravity): 5.00 | 7.81 | 4.98
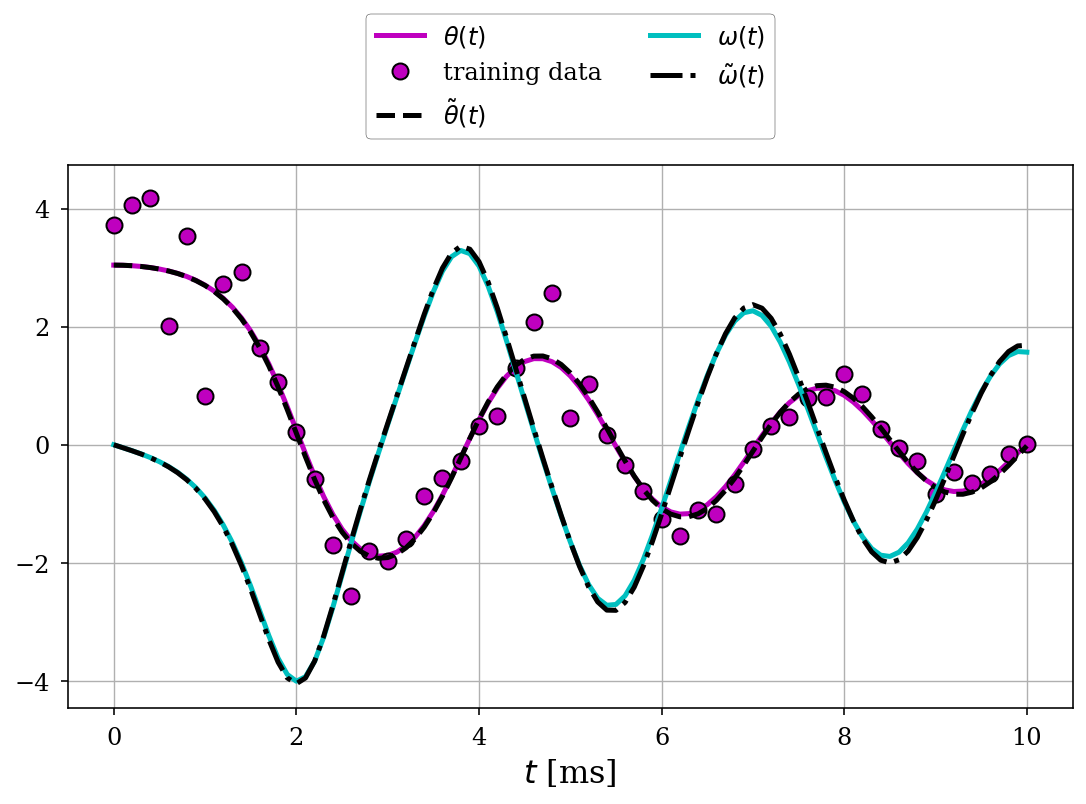
The fitted trajectory (dashed black lines) matches the true solution almost perfectly, recovering the underlying dynamics despite measurement noise:
Why This Matters
This approach, differentiating through a physics simulator, is powerful. You can:
- Learn physical constants from real-world data
- Calibrate simulation parameters
- Do system identification without deriving analytical gradients
JAX makes this almost trivial. The same pattern works for much more complex systems: neural ODEs, PDE solvers, anything you can write as a differentiable program.